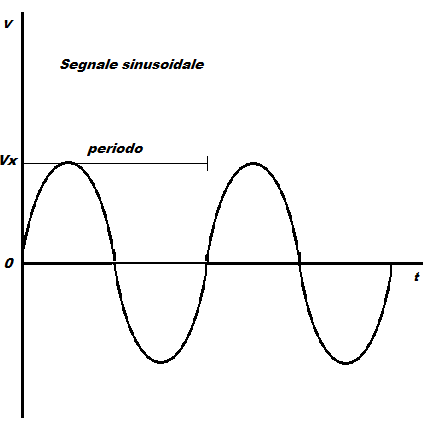
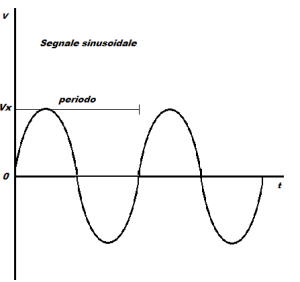
I circuiti raddrizzatori sono quei circuiti che trasformano un segnale sinusoidale (ovvero corrente alternata) fornito in entrata ,in un segnale non più alternato ma con un segno solo negativo o positivo(tensione unidirezionale pulsante) in uscita.
Esistono due tipi di raddrizzatori:
I circuiti raddrizzatori sono quelli atti a rendere unidirezionale la corrente da fornire ad un carico partendo da un segnale alternato in ingresso.
Si dividono fondamentalmente i raddrizzatori ad una semionda e a doppia semionda.
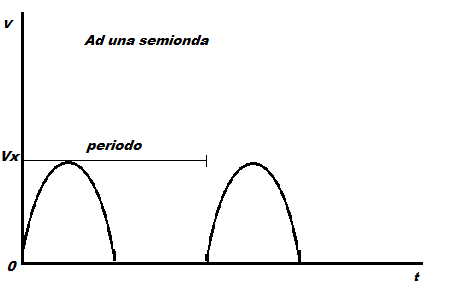
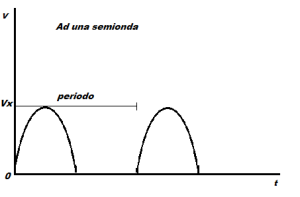
-Ad una semionda quando si sfruttano le semionde o negative o positive del segnale d’entrata avendo in uscita un segnale composto da semionde o positive o solo negative intervallate tra loro da uno spazio a tensione zero lungo quanto la semionda mancante.
-Ad una semionda : lascierà passare solamente le semionde positive o negative a seconda del verso di connessione del diodo raddrizzatore utilizzato.
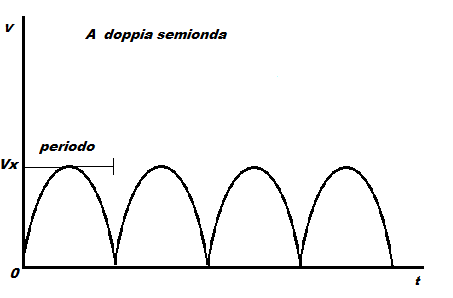
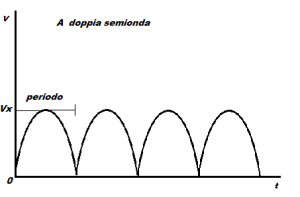
-A due semionde quando si sfruttano del segnale d’entrata tutte le semionde sia positive che negative fornendo un segnale d’uscita composto da semionde o solo positive o solo negative senza intervalli di tempo. Il circuito che ci permette di avere un segnale a due onde è il ponte di Graetz usato negli alimentatori.
-A due semionde : lascierà passare sia le semionde positive che quelle negative ribaltate di segno.
In questo caso la frequenza del segnale raddrizzato avrà un valore doppio rispetto all’originario.
Per questo tipo di raddrizzamento si usano o il ponte a diodi di Graetz o un raddrizzamento a doppia semionda con due diodi.
 (nelle immagini riportate non ho considerato la tensione di soglia dei diodi la quale influisce sul segnale d’uscita)
(nelle immagini riportate non ho considerato la tensione di soglia dei diodi la quale influisce sul segnale d’uscita)
Le immagini di cui sopra riportano il segnale sinusoidale di ingresso oscillante rispetto al valore zero e le forme d’onda d’uscita nel raddrizzatore ad una e a due semionde rispettivamente.
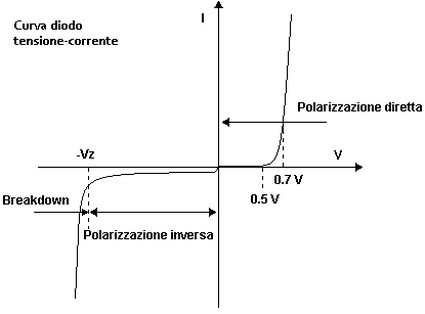
Le immagini sono indicative e non contemplano il valore tipico di soglia dei diodi al silicio utilizzati circa 0,5V che comporteranno una riduzione del valore di picco della forma d’onda d’uscita .
Tale riduzione sul valore di picco d’uscita sarà di 0,5V nel caso di raddrizzamento ad una semionda e di 0,5V x 2 nel caso di raddrizzatore a doppia semionda.
L’errore compiuto trascurando tale tensione sarà tanto meno trascurabile tanto più bassa sarà la tensione da raddrizzare rispetto ai 0,5 V o al 1 V relativi al tipo di raddrizzamento utilizzato.
Questo tipo di circuito è comunemente utilizzato negli alimentatori.
Nell’esperienza effettuata abbiamo realizzato un raddrizzatore ad una semionda utilizzando:
-Un oscilloscopio , che è uno strumento in grado di visualizzare tramite un tubo a raggi catodici l’andamento del segnale nel tempo.
-Un generatore di segnale usato per generare un segnale sinusoidale ad 1Khz 5 Volts picco picco.
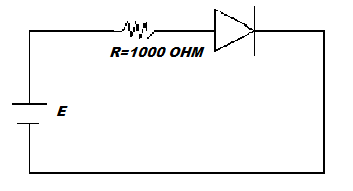
-Un diodo 1n4007 ,una resistenza da 330 ohm, una breadboard sulla quale abbiamo montato il circuito.
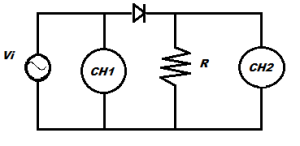
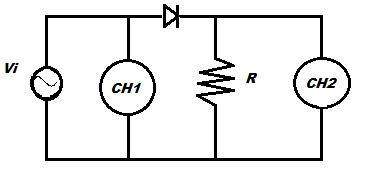
Una volta assemblato il circuito che può essere definito come un quadripolo(ovvero una rete elettrico comunque complessa in grado di scambiare segnali col mondo esterno mediante due morsetti d’entrata e due d’uscita) abbiamo alimentato il circuito con un segnale sinusoidale di ampiezza 5v e con frequenza ad 1khz e dopo abbiamo collegato ai capi della resistenza l’oscilloscopio(CH2),il quale ci ha mostrato un segnale ad una semionda con lo stesso periodo (più o meno) e ci siamo calcolati la sua ampiezza moltiplicando i volt su divisione con la l’altezza dell’onda in centimetri ovvero 1 V/DIV*2=2V.
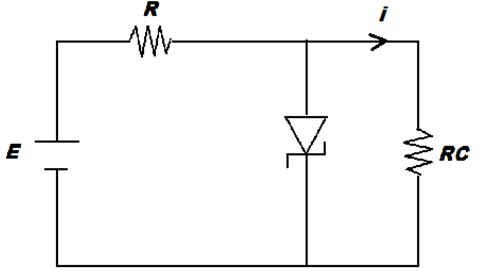
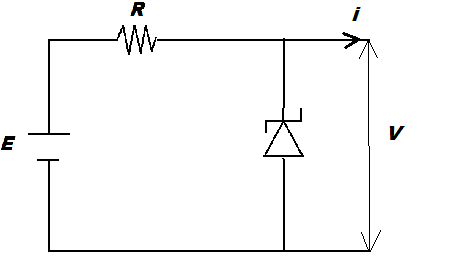
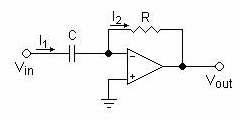
Il circuito in esame nell’esperienza corrisponde a quello riportato nella figura superiore.
Può tranquillamente considerarsi un quaripolo ovvero una rete elettrico comunque complessa in grado di scambiare segnali col mondo esterno mediante due morsetti d’entrata e due d’uscita.
Abbiamo connesso i componenti e i canali dello’oscilloscopio come in figura onde poter monitorare e rapidamente confrontare il segnale in ingresso con quello in uscita.
Il generatore erogava 5 Volts picco picco ad una frequenza di 1 KHz.
Entrambe le misure dei segnali d’ingresso e d’uscita sono state effettuate con i due canali dell’oscilloscopio utilizzando sonde 1/1, essendo la scala di misura di ambedue i canali 1V/Div ho misurato un’ampiezza picco picco d’ingresso di 5 Divisioni x 1 Vdiv= 5Vpp , mentre per il segnale d’uscita l’ampiezza picco picco era di due sole divisioni in quanto 2 Divisioni x 1Vdiv =2 Vpp in quanto la caduta di tensione dovuta alla soglia del diodo al silicio ha portato ad un abbassamento del 20 % della tensione della semionda raddrizzata.
Se il segnale in ingresso fosse stato da 50 Volts picco picco la riduzione del valore sarebbe stata del 2 %.
Il funzionamento del circuito è semplice perché in entrata noi abbiamo una tensione alternata della quale solo la parte polarizzata direttamente col diodo passa,ovvero quando sull’anodo del diodo vi c’è il positivo di Vi la corrente passa vedendo tramite l’oscilloscopio una semionda positiva,mentre quando sull’anodo del diodo vi c’è il negativo di Vi la corrente non passa vedendo tramite l’oscilloscopio non una semionda negativa ma una retta con tensione pari a 0V.Naturalmente nel circuito se mettessimo il diodo al contrario vedremmo in uscita solo un segnale a semionda negativa.
Possiamo notare che confrontando il segnale d’entrata(CH1) con il segnale d’uscita(CH2) le ampiezze di questi due segnali non saranno affatto uguali perché nel primo avremo un segnale di ampiezza pari a 5V,mentre nel secondo avremo un segnale che sarà uguale a 5V diviso 2 meno 0,5 , perché dei 5V d’ingresso 2,5 erano positivi e 2,5 erano negativi,ed escludendo quelli negativi,in uscita avevamo 2,5-0,5 dove 0,5 rappresenta la tensione di soglia del diodo. Per capire meglio questo fatto basta immaginare il diodo come un generatore di tensione continua con valore pari alla tensione di soglia e con in serie una resistenza pari alla resistenza interna del diodo, che si oppone alla tensione di 2,5V,infatti come ho detto prima questo circuito può essere visto come un quadripolo,ed una caratteristica del quadripolo è proprio quella che il segnale d’entrata non sarà mai uguale a quello d’uscita. Una piccola osservazione va fatta anche sul ponte di Graetz il quale fornisce in uscita un segnale a doppia semionda uguale alla semionda o positiva o negativa(dipende da quale si utilizza) meno la tensione di soglia di ben due diodi,perciò se si lavora con piccole tensioni la differenza tra la tensione d’ingresso con quella d’uscita sarà grossolana,mentre se lavora con tensioni grandi la differenza sarà perlopiù influente (lo stesso ragionamento lo possiamo fare con il raddrizzatore a una semionda).